Código:
#include <NewPing.h>
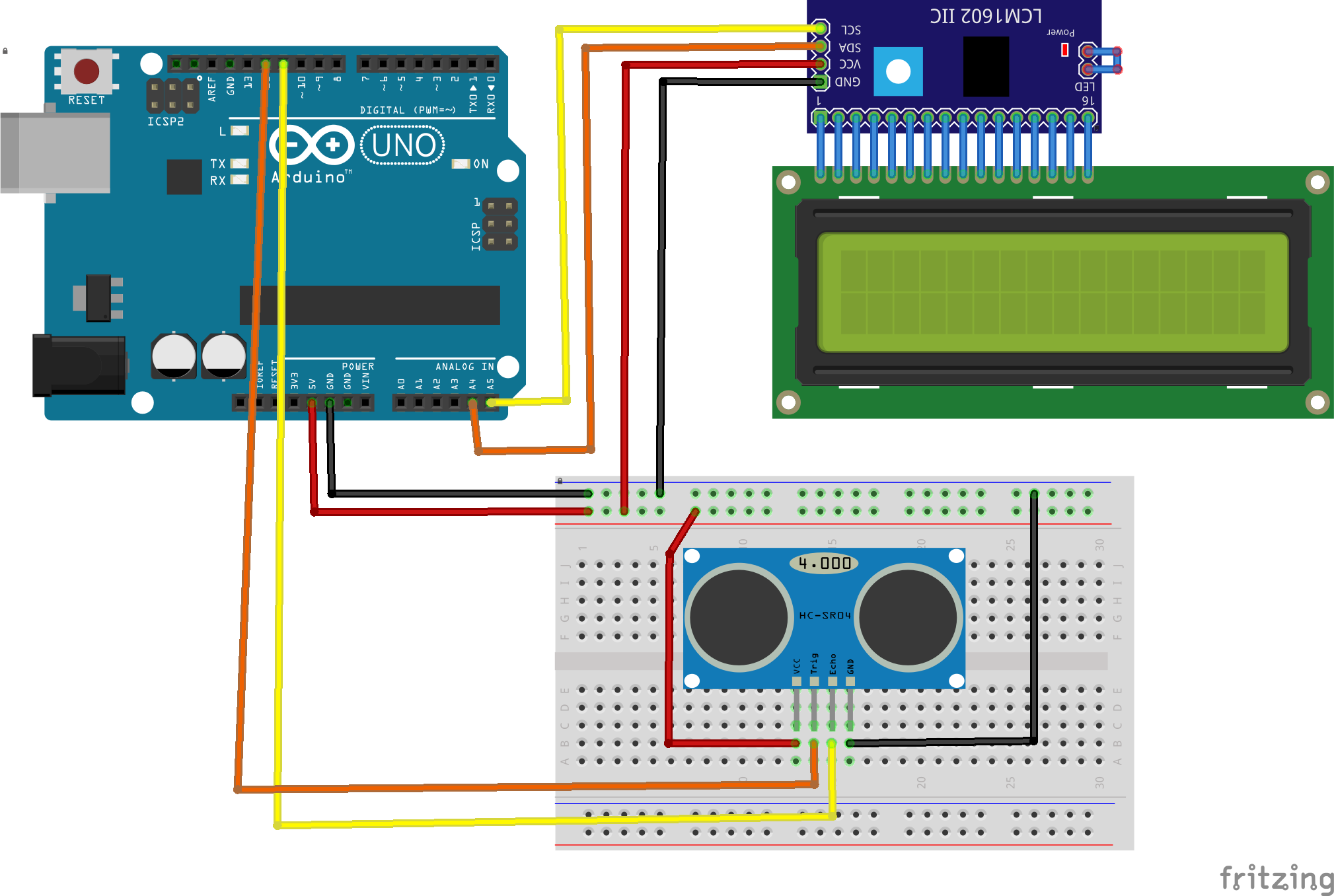
/*Aqui se configuran los pines donde debemos conectar el sensor*/
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200
#include <DHT11.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
//Crear el objeto lcd dirección 0x3F y 16 columnas x 2 filas
LiquidCrystal_I2C lcd(0x3F,16,2); //
int pin=2;
DHT11 dht11(pin);
/*Crear el objeto de la clase NewPing*/
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(9600);
// Inicializar el LCD
lcd.init();
//Encender la luz de fondo.
lcd.backlight();
}
void loop() {
// Esperar 1 segundo entre mediciones
delay(1000);
// Obtener medicion de tiempo de viaje del sonido y guardar en variable uS
int uS = sonar.ping_median();
// Imprimir la distancia medida a la consola serial
Serial.print("Distancia: ");
// Calcular la distancia con base en una constante
Serial.print(uS / US_ROUNDTRIP_CM);
Serial.println("cm");
// datos al LCD
lcd.setCursor(0,0);
lcd.print("Distancia:");
lcd.setCursor(5,1);
lcd.print(uS / US_ROUNDTRIP_CM);
lcd.print(" cm ");
}